")
")
")



Payments and Security
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
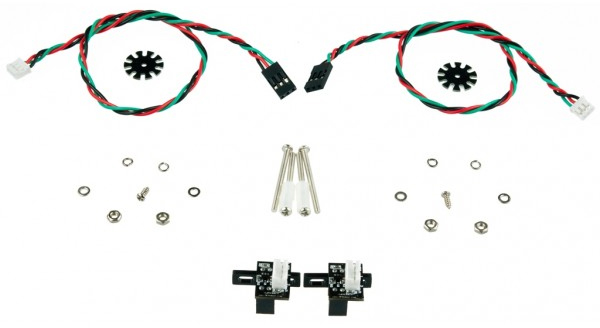
Description
- Voltage:+5V
- Encoders are designed for DFRobot 3PA and 4WD Rovers
- Can give you the rotation degree of the wheels
- Includes encoders, plastic tube, paper-mediated gasket etc
The DFRobot Wheel Encoders for DFRobot 3PA and 4WD Rovers (2pk)are designed for manufacturer 3PA and AWD Rovers. It can give you the rotation degree of the wheels. Encoder uses non-contact method to convert the angular displacement signals. Best fit with Micro DC Geared Motor. It includes encoders, plastic tube, paper-mediated gasket etc.
ZIP File
- Voltage: +5V
- Current: <20mA
- Resolution: 20 PPR
- Weight: 20g